摘要
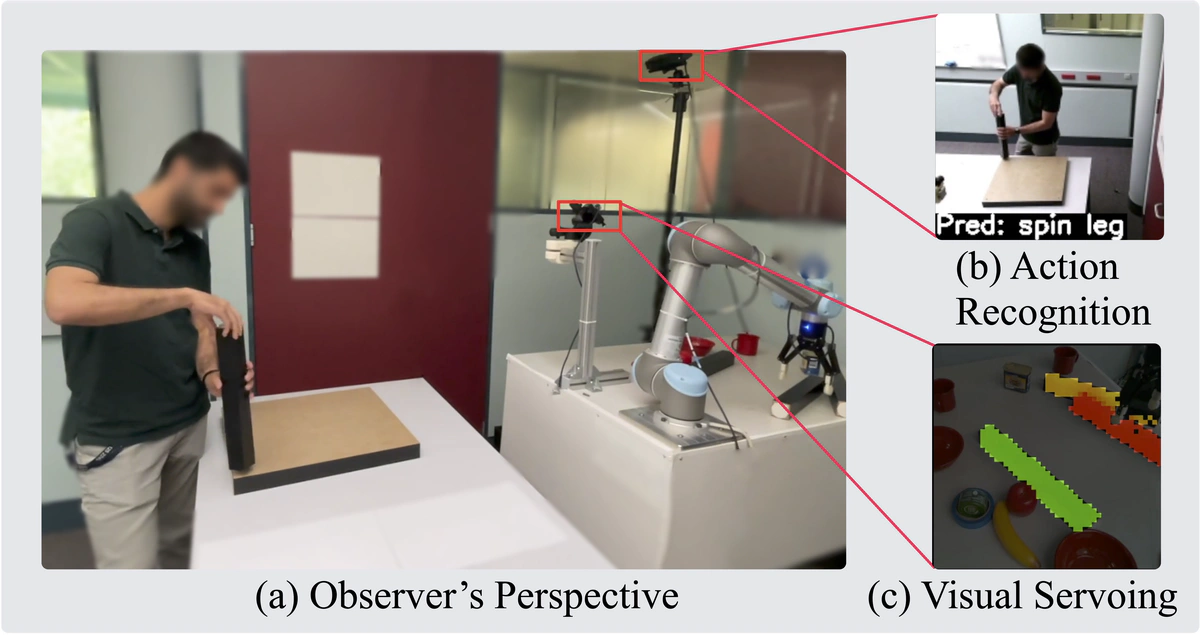
当前向智能制造转型的趋势,使制造流程中对人机协作(HRC)的需求日益增长。对人类协作者行为的感知与理解,使协作机器人在非结构化、动态环境中高效且有效地执行任务面临挑战。将近期数据驱动的机器视觉能力整合进HRC系统,是应对这些挑战的合理下一步。然而在这类场景中,现成组件常受泛化能力限制而表现不佳。要充分评估这些方法的成熟度与鲁棒性,必须进行真实世界验证。此外,在融合多模态之前,先理解纯视觉方案的能力与局限是关键第一步。本文提出GoferBot,一种面向真实装配任务、基于视觉的语义化人机协作系统。该系统由三个模块组成:在非结构化、多实例和动态环境中完成装配零件到达与抓取的视觉伺服模块;用于隐式沟通的人类动作预测模块;以及利用对人类行为感知理解来提供直观且高效协作体验的视觉交接模块。GoferBot通过仅依赖视觉感知中的隐式语义信息实现了各子模块的无缝集成,是一种新型装配系统。
类型
出版物
In International Conference on Intelligent Robots and Systems 2022