Abstract
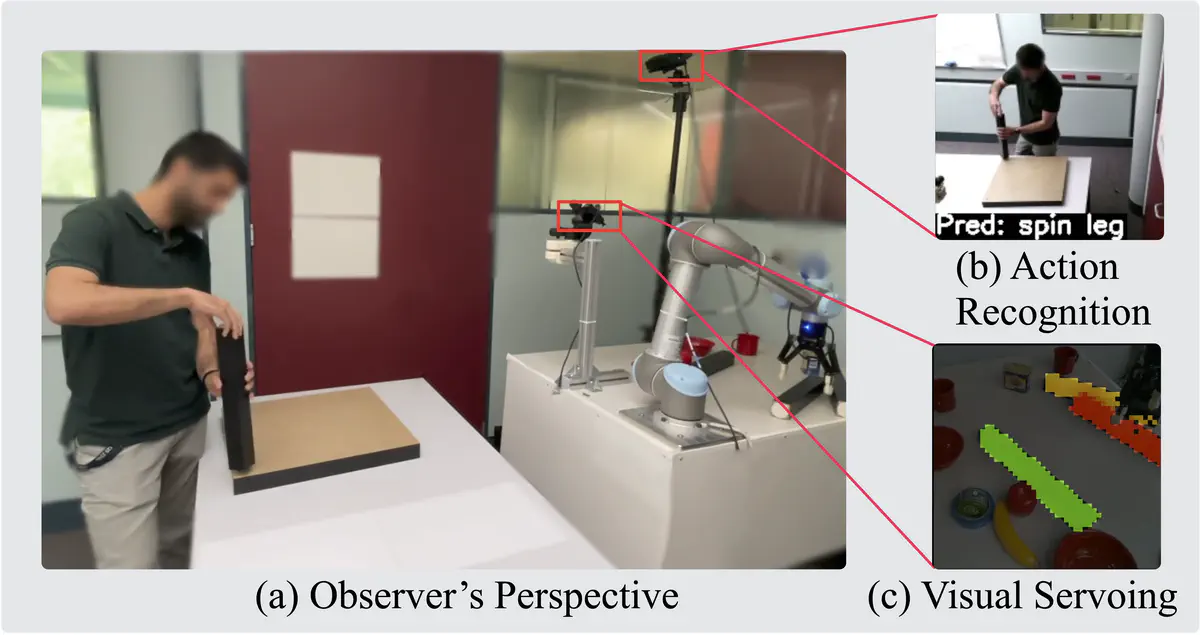
The current transformation towards smart manufacturing has led to a growing demand for human-robot collaboration (HRC) in the manufacturing process. Perceiving and understanding the human co-worker’s behaviour introduces challenges for collaborative robots to efficiently and effectively perform tasks in unstructured and dynamic environments. Integrating recent data-driven machine vision capabilities into HRC systems is a logical next step in addressing these challenges. However, in these cases, off-the-shelf components struggle due to generalisation limitations. Real-world evaluation is required in order to fully appreciate the maturity and robustness of these approaches. Furthermore, understanding the pure-vision aspects is a crucial first step before combining multiple modalities in order to understand the limitations. In this paper, we propose GoferBot, a novel vision-based semantic HRC system for a real-world assembly task. It is composed of a visual servoing module that reaches and grasps assembly parts in an unstructured multi-instance and dynamic environment, an action recognition module that performs human action prediction for implicit communication, and a visual handover module that uses the perceptual understanding of human behaviour to produce an intuitive and efficient collaborative assembly experience. GoferBot is a novel assembly system that seamlessly integrates all sub-modules by utilising implicit semantic information purely from visual perception.
Jiahao Zhang
Ph.D. Student
My research interests include Deep Learning, Computer Vision and Web Development.